WOLF: A modular estimation framework for robotics based on factor graphs
Joan Sola, Joan Vallve, Joaquim Casals, and 5 more authors
IEEE Robotics and Automation Letters, 2022
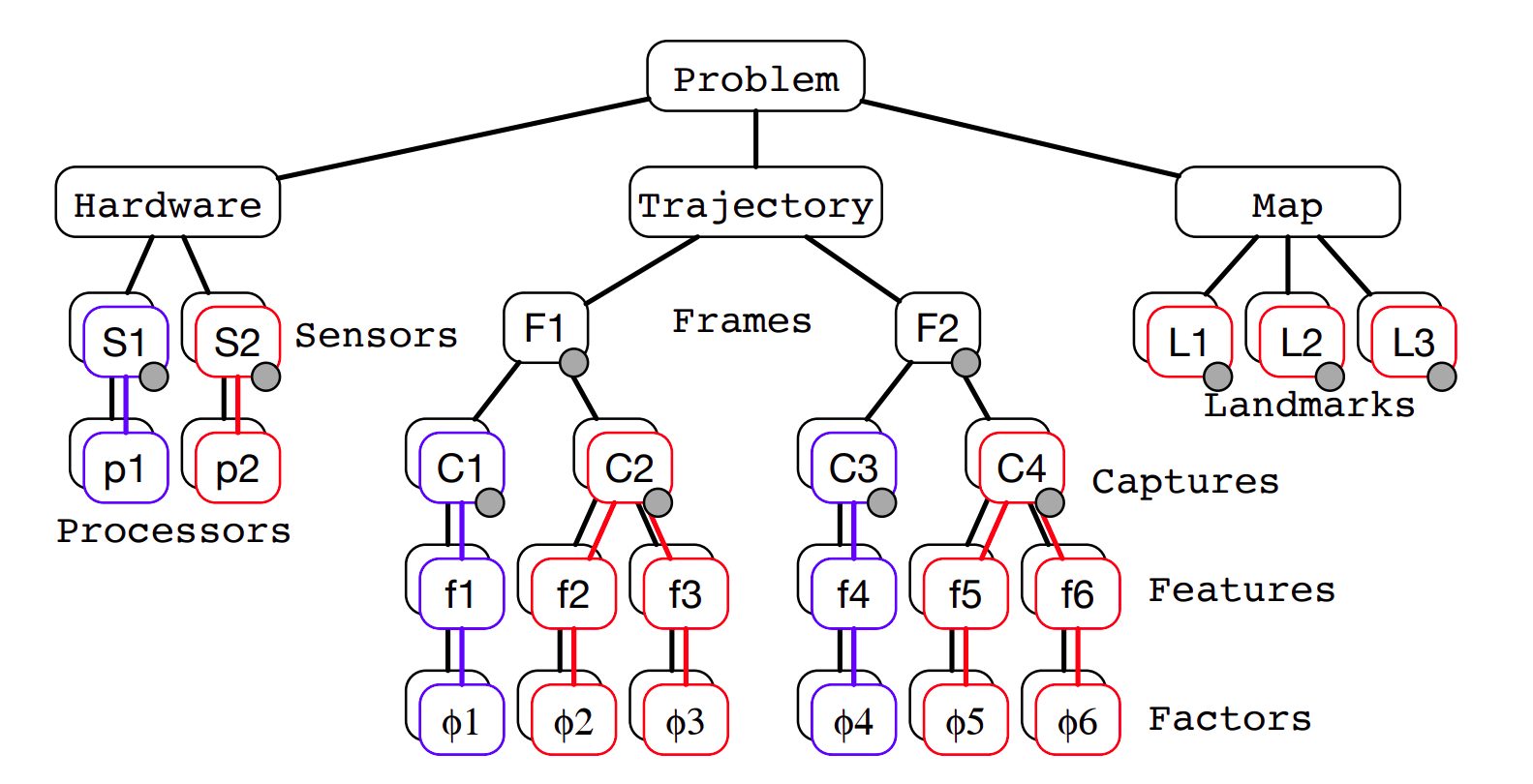
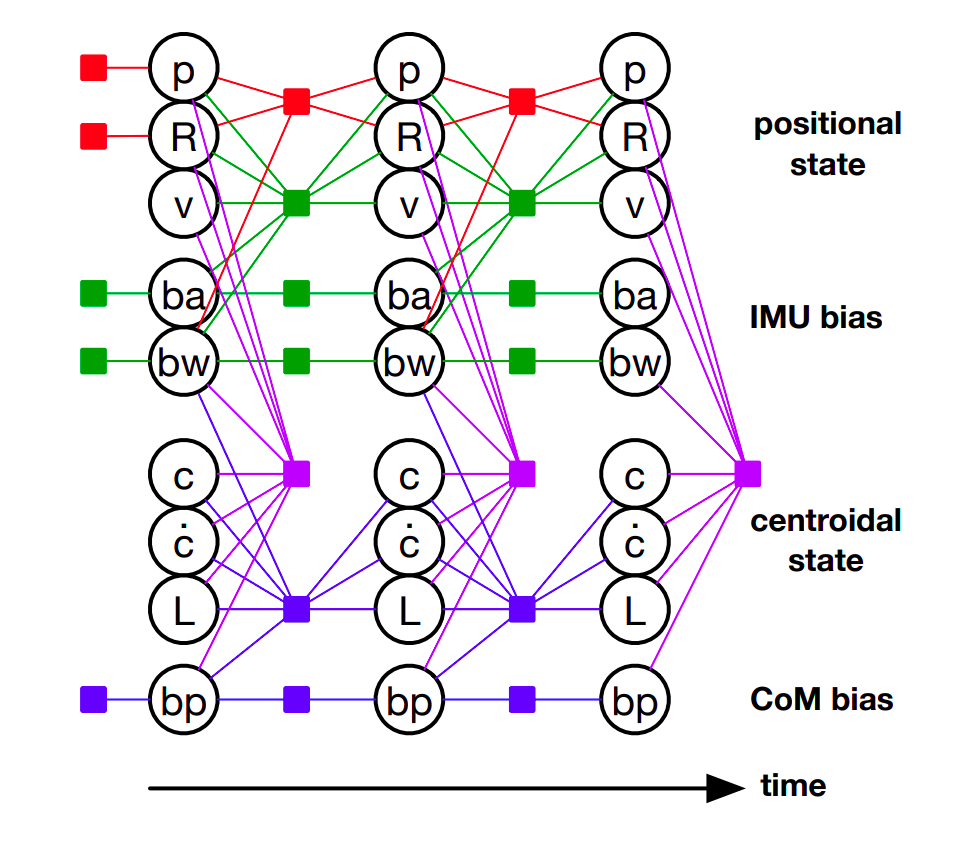
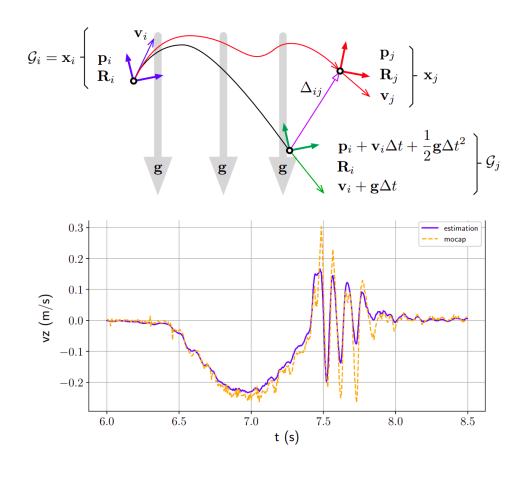
This paper introduces WOLF, a C++ estimation framework based on factor graphs and targeted at mobile robotics. WOLF extends the applications of factor graphs from the typical problems of SLAM and odometry to a general estimation framework able to handle self-calibration, model identification, or the observation of dynamic quantities other than localization. WOLF produces high throughput estimates at sensor rates up to the kHz range, which can be used for feedback control of highly dynamic robots such as humanoids, quadrupeds or aerial manipulators. Departing from the factor graph paradigm, the architecture of WOLF allows for a modular yet tightly-coupled estimator. Modularity is based on plugins that are loaded at runtime. Then, integration is achieved simply through YAML files, allowing users to configure a wide range of applications without the need of writing or compiling code. Synchronization of incoming data and their processing into a unique factor graph is achieved through a decentralized strategy of frame creation and joining. Most algorithmic assets are coded as abstract algorithms in base classes with varying levels of specialization. Overall, these assets allow for coherent processing and favor code reusability and scalability. WOLF can be interfaced with different solvers, and we provide a wrapper to Google Ceres. Likewise, we offer ROS integration, providing a generic ROS node and specialized packages with subscribers and publishers. WOLF is made publicly available and open to collaboration.